Prototype 1
The first robot we designed was made to push itself up the stairs. We used all three motors to try to get it up. Two motors were used in the front of the robot to pull itself up the stair, while the motor in the back was made to push the back end of the robot up the stairs. This robot was a failure.
Prototype 2

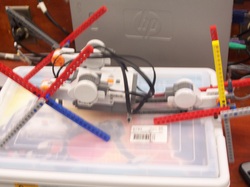
In our second prototype we changed a little bit to the design to make it easier for the motors to lift it. It was to heavy in the last design so the robot would not lift up. This prototype had failed to make it up too :( . There was not enough grip to the end of each 15 bar piece so we have to modify that.
Prototype 3

