Distance Bot
In this challenge we had to pair up with another robot and figure out the amount of time it would take to have the two robots meet. We had to use the sound, light and both touch sensors shown by our pictures. The first one you see the sound sensor. The second you see the two touch sensors. The thrid you see the undercarriage of the bot which shows you where the light sensor was placed.


Math
First we had to find the Distance traveled, rate of speed and time in motion. We divided the distance by time in order to find velocity. Which were 49.4 / 4 which got us a velocity of 12.35. Then are partner did the same using his numbers. Which were 53.4 / 4 which got them 13.475 as a velocity. We then added those to velocities together and got a combined velocity of 25.35. We then divided the combined velocity by the total distance which was 10 feet. We got a time of 2.5825 seconds.
Graph
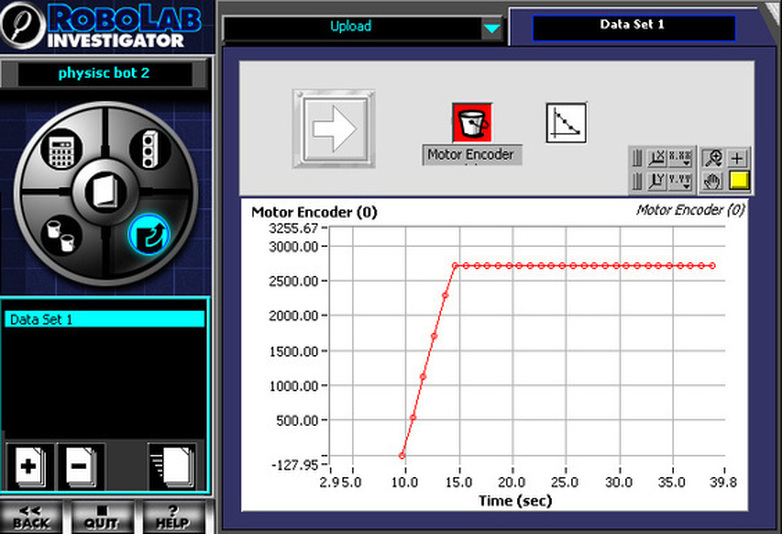
This is the graph where we got all of are infomation.
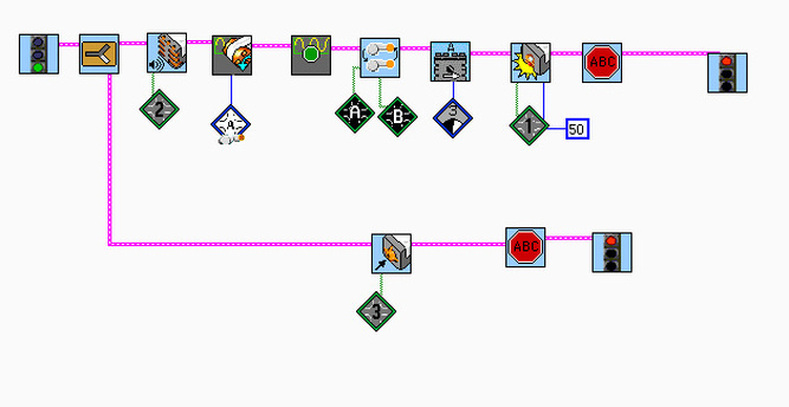
This is the program that used to make are robot do everything we wanted it to do. We first started it with a task split so the robot could perform two things at the same time. The first and main task was started off with a sound sensor that started the robot with a clap. It then counted the number of rotation during the bots travel. Even though we had two motors on the bot we didn’t need two in the program because we used a thing called motor sync so whatever motor a does motor b would copy. We then had to ways for the robot to stop. If it went off the black line or if the touch sensor was pushed in.
Reflection Questions
Our project was to build a bot with a light sensor, sound sensor, and a touch sensor that would be able to follow the black line and collide with another bot. We were to use math formulas to figure out the distance, speed, and how long it took the bots to collide. We needed to know the correct formulas we needed to come up with the correct math problems. We also needed to figure out a program that would correctly work and make the bot do what we wanted it to do. First we started to build an original design for our bot. We had a main idea of how the bot would look but over time we made some minor design changes. Then we tried many different programs that didnt work. After a few tries we finally found a program that would make the bot do what we wanted it to. After the bot was completely done we tested it with another bot and recorded the results. After that we plugged in our findings into the math formulas and found all the information we needed. We found out the exact time it took the two bots to collide and the speed at which they collided. We recieved alot of imput from our instructor and fellow students. The class was able to develop a program that would work properly together. My partner and I learned a few new things suc as math formulas and how to develop a succesful bot.
