Light Sensor Robot
We designed our robot with a light sensor to be able to detect how fast it was traveling. We connected a light sensor to the back wheels so that it could pick up the black line on the board to analize the data. At first, our robot was too fast and the light sensor could not read the black lines. So we took off the gears and simply connected the tires right to the motors. This slowed it down enough so that it could read the black lines as the robot passed over them. The graphs below show what the robot recorded.
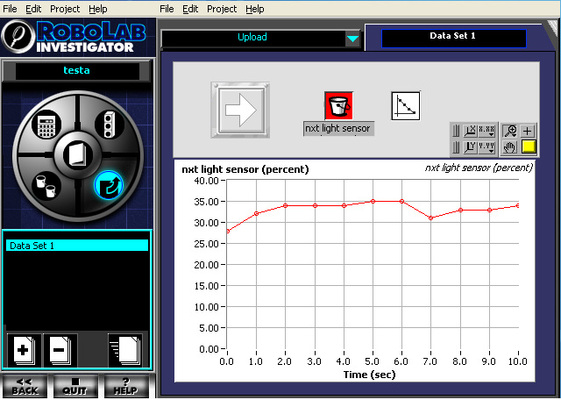
Prototype One
This is the graph that our prototype one recorded. It was mostly a straight line with little difference in the light.
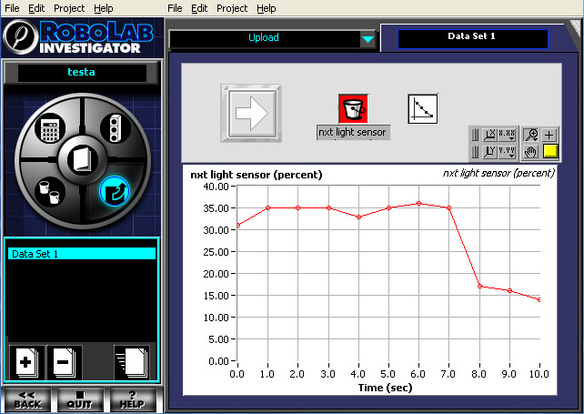
Prototype Two
Prototype two recorded this graph. It shows alot more helpful data and has a few spikes in it.
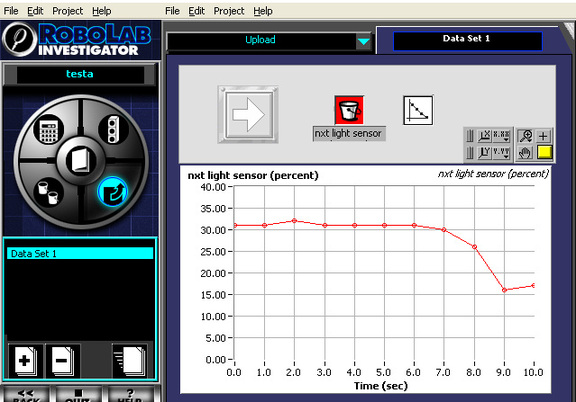
Prototype Three
The prototype three graph is similiar to both the first and second graphs. It is flat at the beginning and has the same drop at the end as the second graph.
Light Video
| 100_5716.mov |
